Architecture¶
Moon uses a thread-per-core shared-nothing architecture where each shard runs independently on its own thread with no shared mutable state.
flowchart TD
C["Client connections"] --> L["TCP / TLS listener"]
L --> R{"Shard router<br/>hash(key) % N"}
R --> S0["Shard 0"]
R --> S1["Shard 1"]
R --> SN["Shard N-1"]
S0 --> D0[("DashTable")]
S1 --> D1[("DashTable")]
SN --> DN[("DashTable")]
D0 --> W0["Per-shard WAL"]
D1 --> W1["Per-shard WAL"]
DN --> WN["Per-shard WAL"]The full picture — request path, shard internals, storage layer, persistence, and the feature satellites (Lua, PubSub, cluster, ACL, replication) — is shown below:
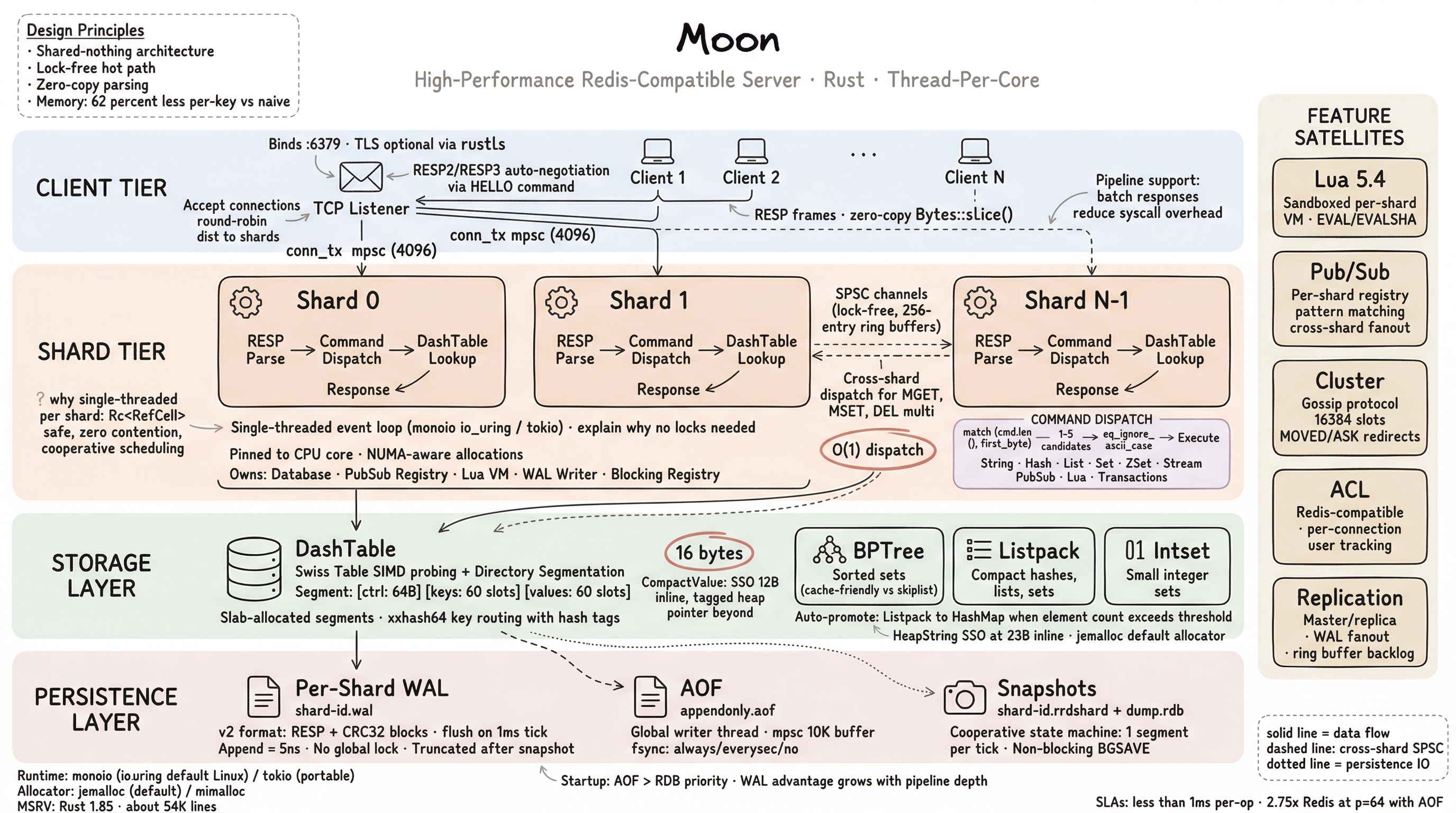
Per-shard components¶
Each shard runs on its own thread with:
- Event loop — Tokio
current_threador MonoioFusionDriverruntime (io_uring on Linux, kqueue on macOS) - DashTable — Segmented hash table with SIMD probing
- WAL writer — Per-shard persistence with no global lock
- PubSub registry — Cross-shard fan-out via flume (MPSC) channels
- Lua VM — Lazy-initialized on first EVAL command
All cross-shard communication uses lock-free message passing. No mutexes on the hot path.
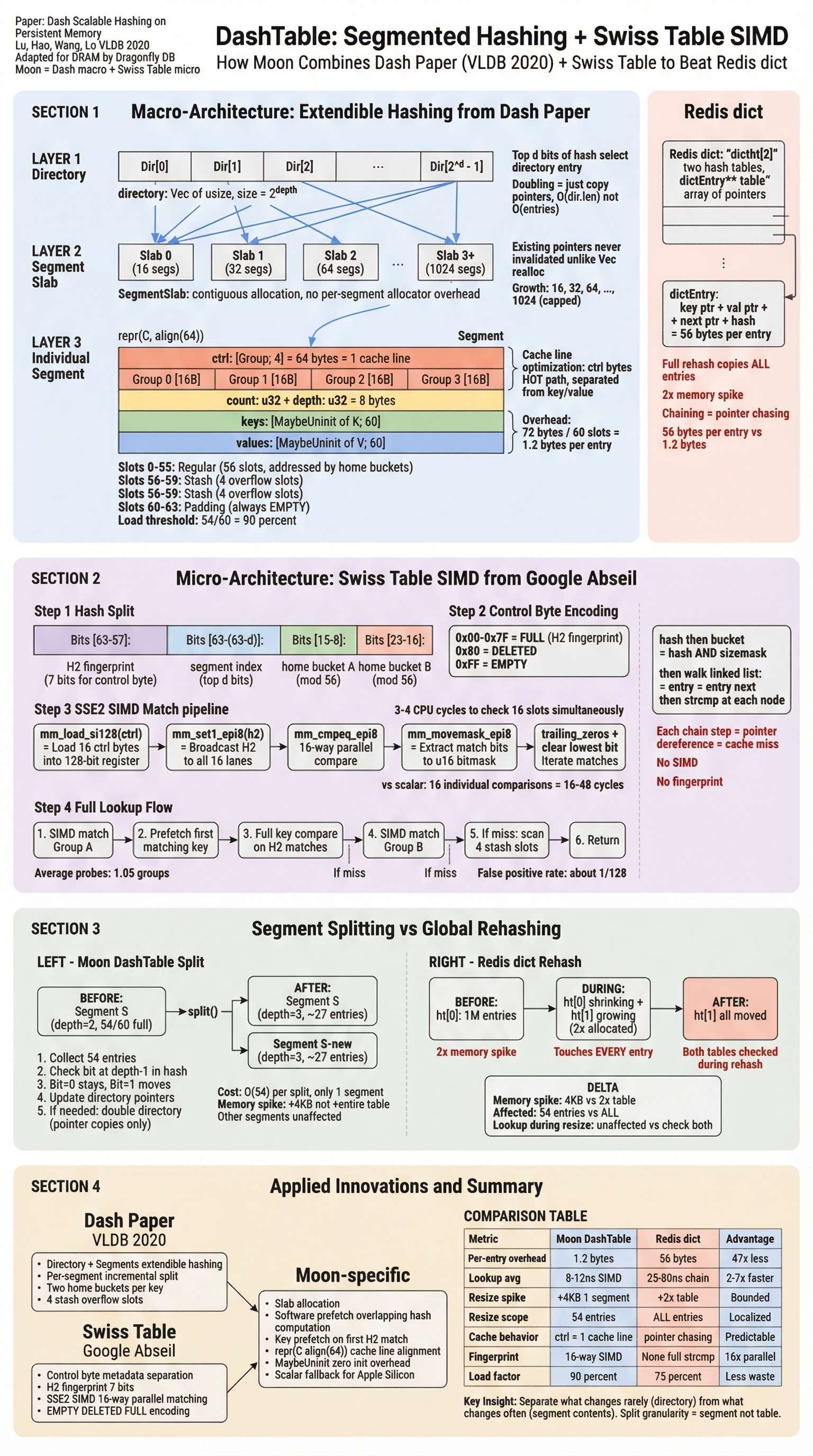
DashTable¶
The primary key-value engine is a segmented Swiss-table hash map with SIMD probing. Each segment holds 60 slots with a 90% load threshold.
| Property | Value |
|---|---|
| Segment size | ~3 KB (64B ctrl + 8B meta + 60 slots) |
| Load threshold | 90% (54/60 slots) |
| Average fill | ~67% |
| Probe method | 16-way SIMD parallel match (SSE2/NEON) |
Keys are routed to segments via xxhash. Within a segment, SIMD control-byte matching finds the target slot in a single instruction.
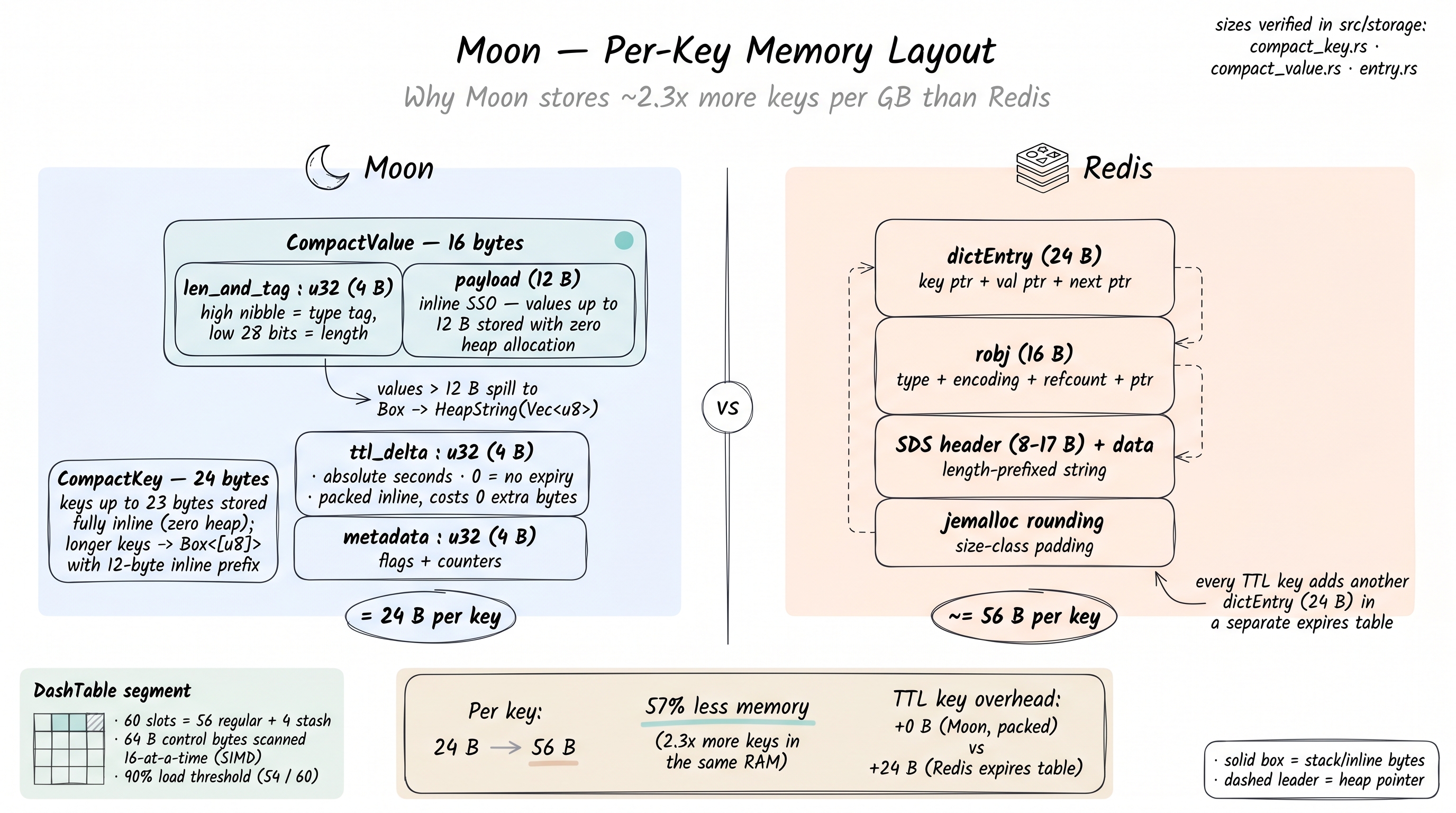
Memory layout¶
Moon uses specialized compact types to minimize per-key overhead:
| Struct | Size | Description |
|---|---|---|
| CompactKey | 24 B | Inline keys up to 23 bytes (zero heap allocation) |
| CompactEntry | 24 B | CompactValue (16B) + TTL delta (4B) + metadata (4B) |
| CompactValue | 16 B | SSO for values up to 12 bytes inline |
| HeapString | 24 B | Vec<u8> with no Arc overhead for non-shared values |
Why Moon uses less memory at larger values¶
Moon: CompactValue(16B) → Box<HeapString> → Vec<u8>(24B) → data
Total overhead: 48 bytes + data
Redis: dictEntry(24B) → robj(16B) → SDS(8-17B + data) + jemalloc rounding
Total overhead: ~64-80 bytes + data
TTL is packed as a 4-byte delta inside CompactEntry, costing zero extra bytes per expiring key. Redis maintains a separate expires hash table with a full dictEntry (24 bytes) per expiring key.
Dual runtime¶
Moon supports two async runtimes:
| Runtime | Platform | Use case |
|---|---|---|
| Monoio (default) | Linux (io_uring), macOS (kqueue) | Peak performance, production |
| Tokio | All platforms | Portability, CI, GitHub Actions |
Monoio's thread-per-core model avoids work-stealing overhead. On Linux, io_uring batch I/O amortizes syscall costs across multiple commands.
Key optimizations¶
| Optimization | Impact | Component |
|---|---|---|
| SIMD probing | 16-way parallel key match | DashTable segments |
| Lock-free oneshot | 12% CPU reduction | Cross-shard dispatch |
| CachedClock | 4% throughput gain | Per-shard event loop |
| Lazy Lua VM | -18 MB baseline | Shard startup |
| Lazy replication backlog | -12 MB baseline | Shard startup |
| Per-shard WAL | Linear scaling with shards | Persistence |
| io_uring batch I/O | Amortized syscalls | Network layer |
| Software prefetch | Overlapped fetch + hash | DashTable lookup |
| Zero-copy argument slicing | Eliminates parse buffer copies | RESP parser |
| Direct GET serialization | Bypasses Frame allocation | Response path |
Vector search engine¶
Moon ships an in-process vector search engine accessed via Redis-compatible
FT.CREATE / FT.SEARCH commands. It uses TurboQuant 4-bit quantization
to compress f32 vectors to ~4 bits per dimension while preserving rank-order
similarity.
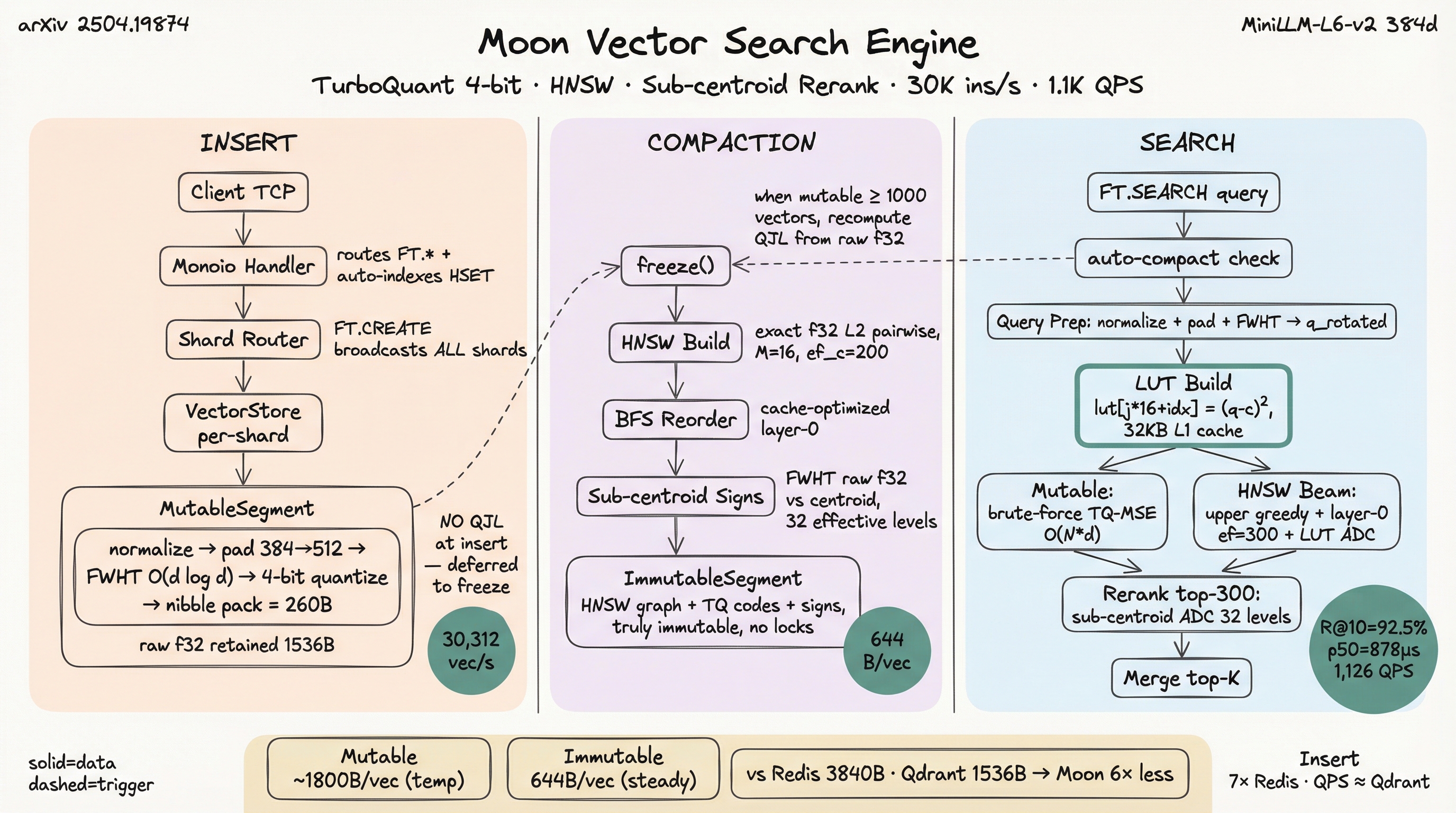
The diagram's insert rate (~30K vec/s) measures raw mutable-segment append (brute-force, before indexing). End-to-end insert throughput including HNSW build and compaction is ~10K vec/s — see the Performance vs Qdrant table below.
Tiered segment architecture¶
| Segment | Backing | Search algorithm | Use case |
|---|---|---|---|
| Mutable | RAM, append-only | Brute-force TQ-ADC | Active inserts |
| Immutable | RAM, frozen | HNSW + TQ-ADC | Hot data, post-compact |
| Warm | mmap'd .mpf files | HNSW + TQ-ADC | Aged-out data |
| Cold | DiskANN | Vamana + PQ | Massive datasets |
HSET key field <f32_blob> automatically encodes + indexes vectors. When the
mutable segment hits COMPACT_THRESHOLD, the next FT.SEARCH triggers
asynchronous compaction into a frozen HNSW immutable segment. Explicit
FT.COMPACT forces unconditional compaction (e.g., end of bulk load).
TurboQuant 4-bit ADC¶
The search hot path uses Asymmetric Distance Computation (ADC) with a per-query lookup table:
- Query vector is FWHT-rotated and normalized once per query
- A 16-entry LUT (or 32-entry with sub-centroid signs) is built per coordinate
- HNSW beam search computes per-candidate distance via 192 nibble-indexed LUT lookups (for 384d) instead of 384 f32 multiply-adds
- Distance kernel is 8-way ILP unrolled with
unsafepointer arithmetic and 8 independent f32 accumulators (verified via objdump: 8 parallelvaddssinto xmm3-xmm8 on x86)
The LUT is pre-allocated in SearchScratch (zero alloc per query). Sub-centroid
sign bits provide 2× quantization resolution at zero memory cost in the search
path.
Performance vs Qdrant (10K MiniLM, 384d, real semantic embeddings)¶
| Moon ARM64 | Moon x86 | Qdrant FP32 x86 | |
|---|---|---|---|
| Recall@10 | 0.967 | 0.967 | ~0.95 |
| Search QPS | 843 | 1,296 | 507 |
| Search p50 | 1.20 ms | 0.78 ms | 1.79 ms |
| Insert | 9,950 v/s | 11,270 v/s | ~2,600 v/s |
Moon beats Qdrant on QPS (2.56×), latency (2.3× lower), recall (+1.7%), insert throughput (4.3×), and memory (~20% less per vector via TQ4).
Graph engine¶
Moon ships an in-process property-graph engine queried with openCypher via
GRAPH.QUERY / GRAPH.RO_QUERY. It reuses the same per-shard, thread-per-core
foundations as the key-value and vector engines: a graph lives inside the shard
that owns it, mutates through the per-shard WAL, and snapshots to immutable
segments — no global lock, no separate process.
flowchart LR
Q["GRAPH.QUERY<br/>(openCypher)"] --> P["logos lexer +<br/>recursive-descent parser"]
P --> PL["Plan compiler<br/>(+ xxhash plan cache)"]
PL --> EX["Row pipeline:<br/>NodeScan · Expand · Filter<br/>Project · Merge · ShortestPath"]
EX --> M[("MemGraph<br/>mutable write buffer")]
M -- "freeze + compact<br/>(~64K edges)" --> C[("CSR segment<br/>immutable, mmap")]
M --> T["Traversal:<br/>BFS · DFS · Dijkstra"]
C --> T
C -. "graph-filtered KNN" .-> V["Vector engine"]
M --> W["Per-shard WAL<br/>+ manifest"]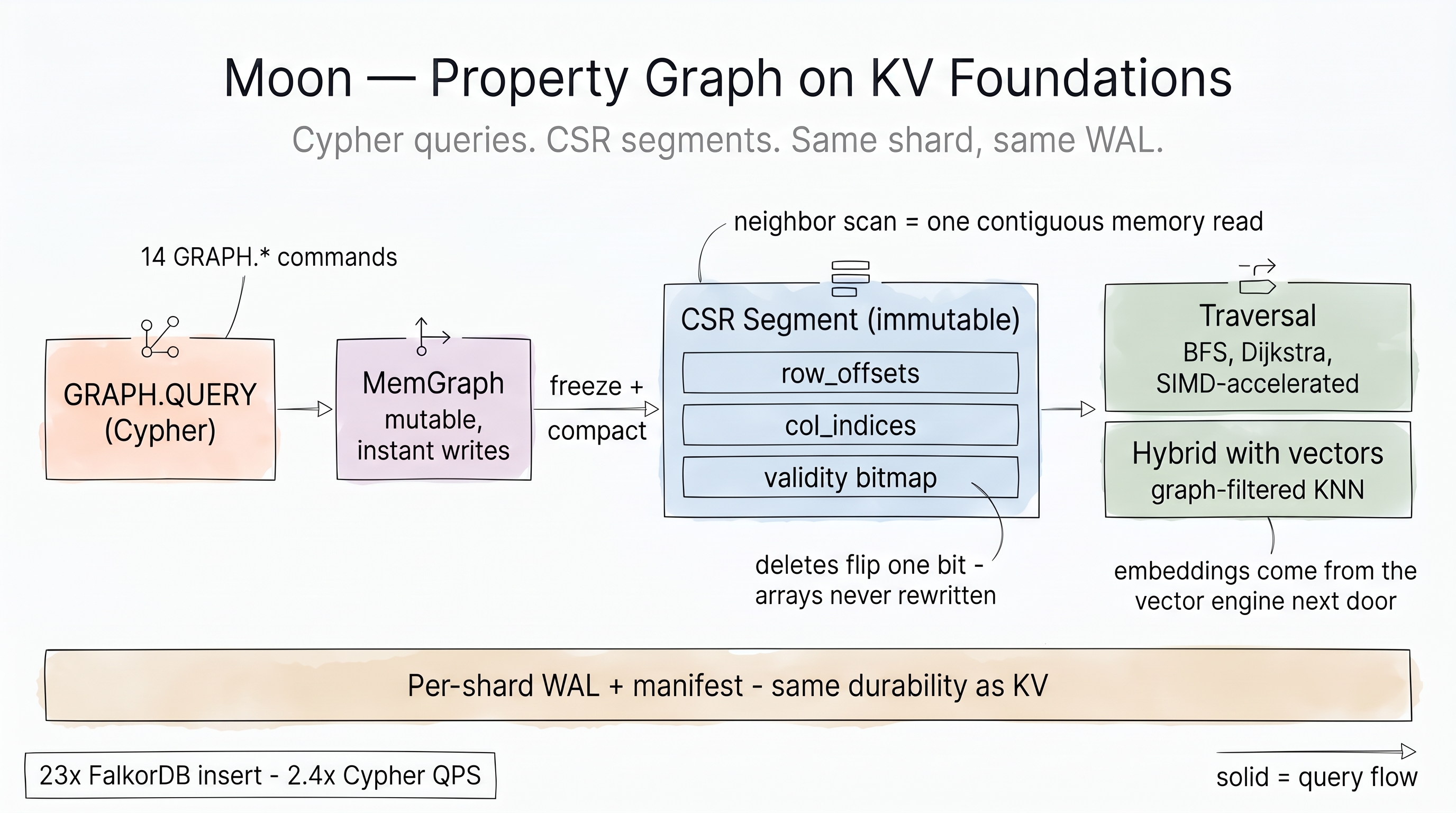
Two-tier storage¶
Like the vector engine, the graph uses a mutable write buffer that freezes into immutable read-optimized segments.
| Tier | Backing | Writes | Reads |
|---|---|---|---|
| MemGraph | RAM, generational SlotMap + inline bidirectional adjacency |
O(1) append, instant | adjacency-list walk |
| CSR segment | RAM heap or mmap'd .csr |
frozen at ~64K edges, then read-only | contiguous neighbor scan + minimal-perfect-hash node lookup |
Nodes and edges carry properties inline (SmallVec<[(u16, PropertyValue)]>);
labels and relationship types are dictionary-encoded to u16. Immutable segments
store edges in Compressed Sparse Row form (row_offsets + col_indices), so a
neighbor scan is one contiguous memory read. Deletes flip a bit in a Roaring
validity bitmap — the CSR arrays are never rewritten until compaction merges
segments and drops tombstones.
The segment list is swapped with ArcSwap, so reads are a single lock-free atomic
load and in-flight traversals keep old segments alive across compaction.
Cypher surface¶
The query path is a logos lexer → recursive-descent parser → linear physical-plan
compiler (with a per-graph xxhash plan cache) → row-based execution pipeline.
Supported clauses include MATCH / WHERE / RETURN (with DISTINCT, ORDER BY,
LIMIT, SKIP), CREATE, MERGE (with ON CREATE / ON MATCH), SET,
DELETE / DETACH DELETE, WITH, UNWIND, variable-length paths, and
shortestPath() (Dijkstra).
Fourteen GRAPH.* commands are exposed: CREATE, ADDNODE, ADDEDGE, DELETE,
DROP, QUERY, RO_QUERY, EXPLAIN, PROFILE, NEIGHBORS, INFO, LIST,
VSEARCH, and HYBRID. The last two bridge to the vector engine for
graph-filtered KNN, vector-guided walks, and graph-constrained re-ranking.
Persistence & consistency¶
Mutations append to the per-shard WAL as RESP records and replay on recovery.
Frozen segments are written as CRC-checked .csr files tracked by a JSON manifest;
recovery loads the manifest, maps the CSR files, then replays the WAL tail. Every
node and edge carries MVCC version stamps plus bi-temporal valid_from /
valid_to, and TXN.ABORT rolls back CREATE / SET / DELETE / MERGE via an
undo log. Cross-shard traversal uses SPSC scatter-gather across shards.
Implemented scope
The engine is production-grade for property-graph storage and the Cypher subset
above (well covered by ~9K lines of integration tests). Tracked gaps, each marked
with a phase number in the source: aggregation (count / collect are currently
per-row no-ops), OPTIONAL MATCH left-join semantics, regex match (=~),
multi-hop edge-variable binding ([r*2..5]), and wiring the label index into
NodeScan (label scans are currently linear over the write buffer).
Design inspirations¶
- Dragonfly — shared-nothing thread-per-core architecture (C++)
- Dash (VLDB 2020) — segmented hash table design
- Swiss Table / Abseil — SIMD control-byte probing
- VLL (VLDB 2012) — lightweight multi-key coordination
- ScyllaDB / Seastar — thread-per-core for databases